CES Projects 2016-17
AMOEBOID SPHERE (PHASE 1):
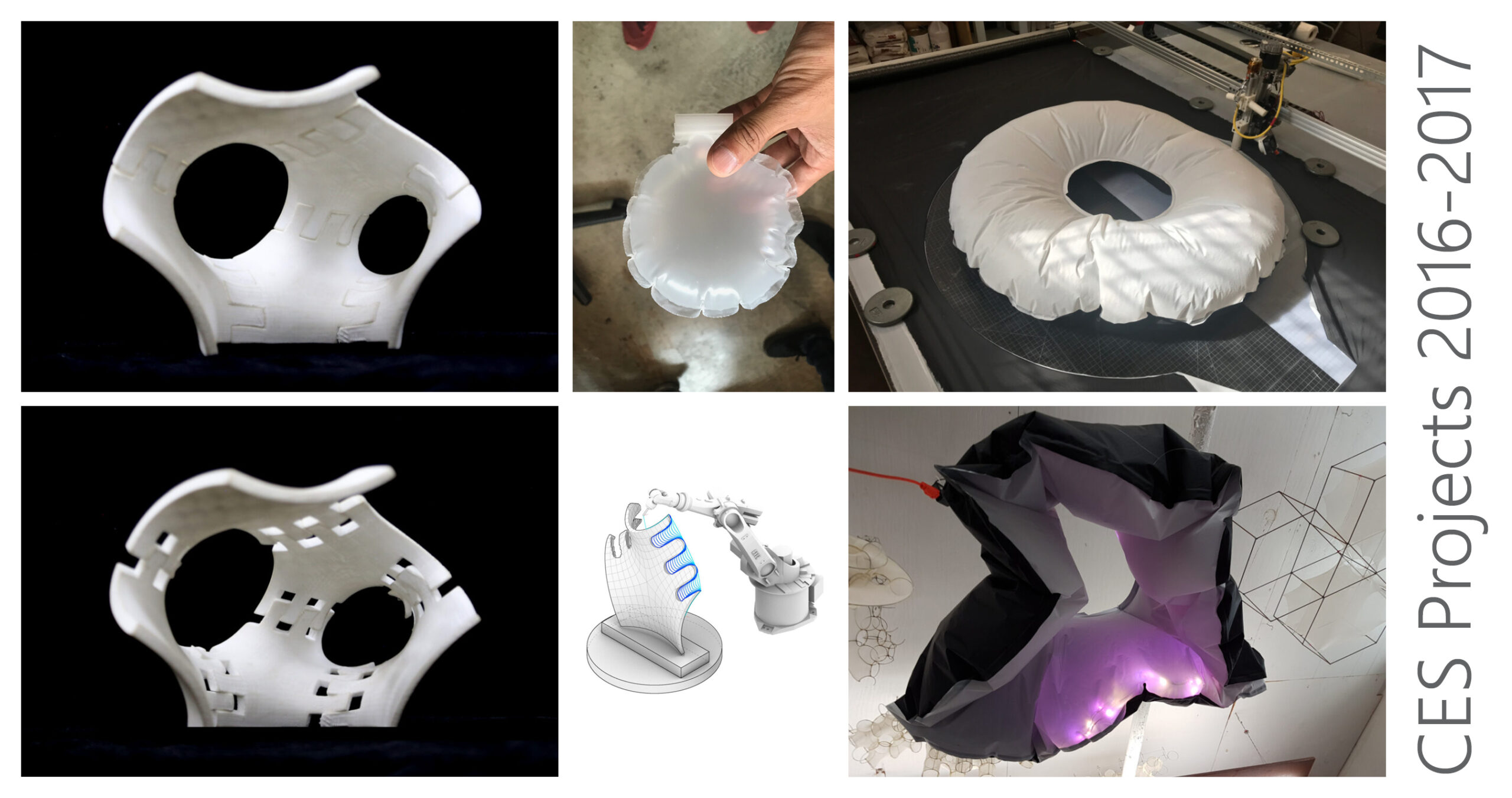
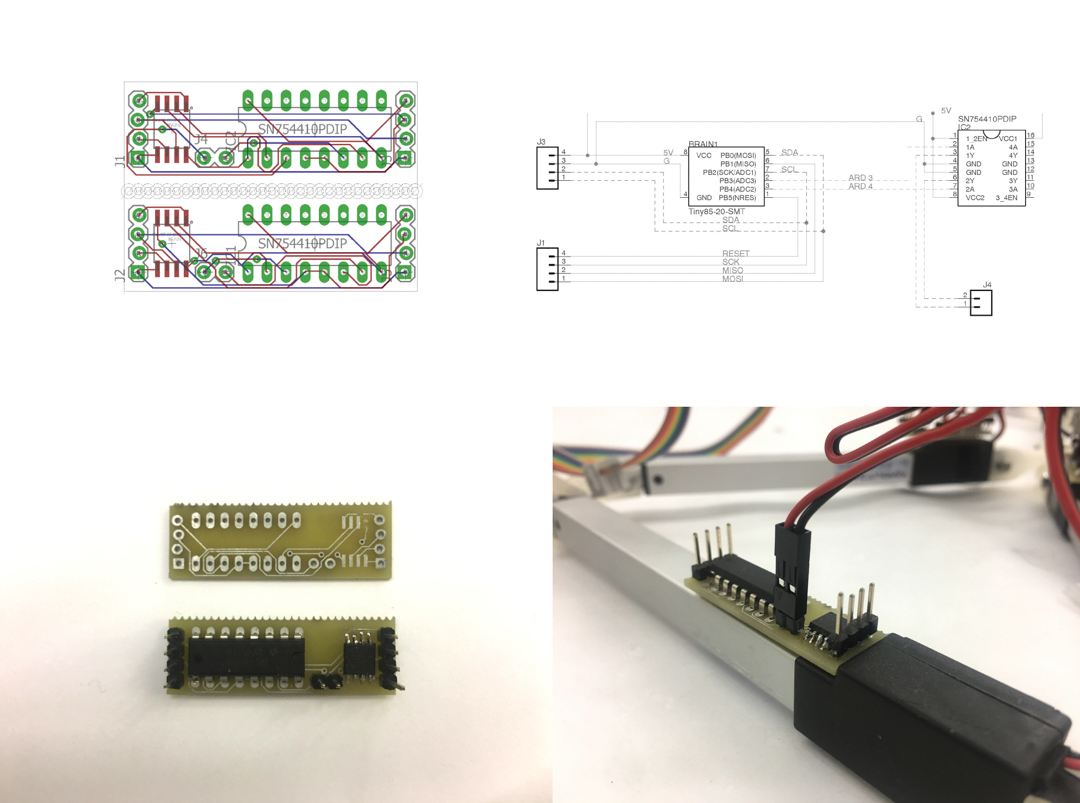
Our goal is to build an actuated morphing amoeboid sphere with a new nonperiodic geometry. Towards this end, we are currently testing the software, hardware and electronics with simple structures like a morphing ring or a morphing tetrahedron (octahedron, icosahedron) as Phase 1 of this project. We’re using servo driven linear actuators and a custom screen based control interface so users can manipulate the geometry in real-time. These experiments build on our early interest in transformational structures begun in the 70’s combined with actuated structures developed at NASA-Langley (Mikulas et al, 1985-90) and non-periodic structures developed by Lalvani (1980’s-90’s).
[Credits]:
Principals: Haresh Lalvani & Che-Wei Wang
Student Research Assistants: David Franck, Arie Solomon.
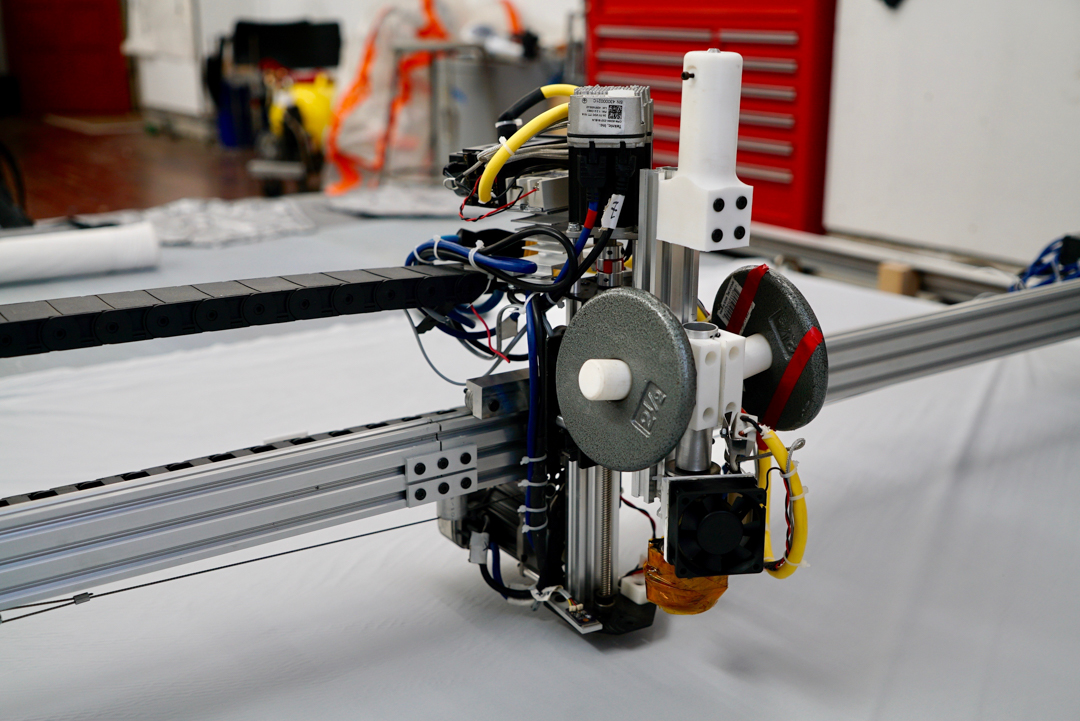
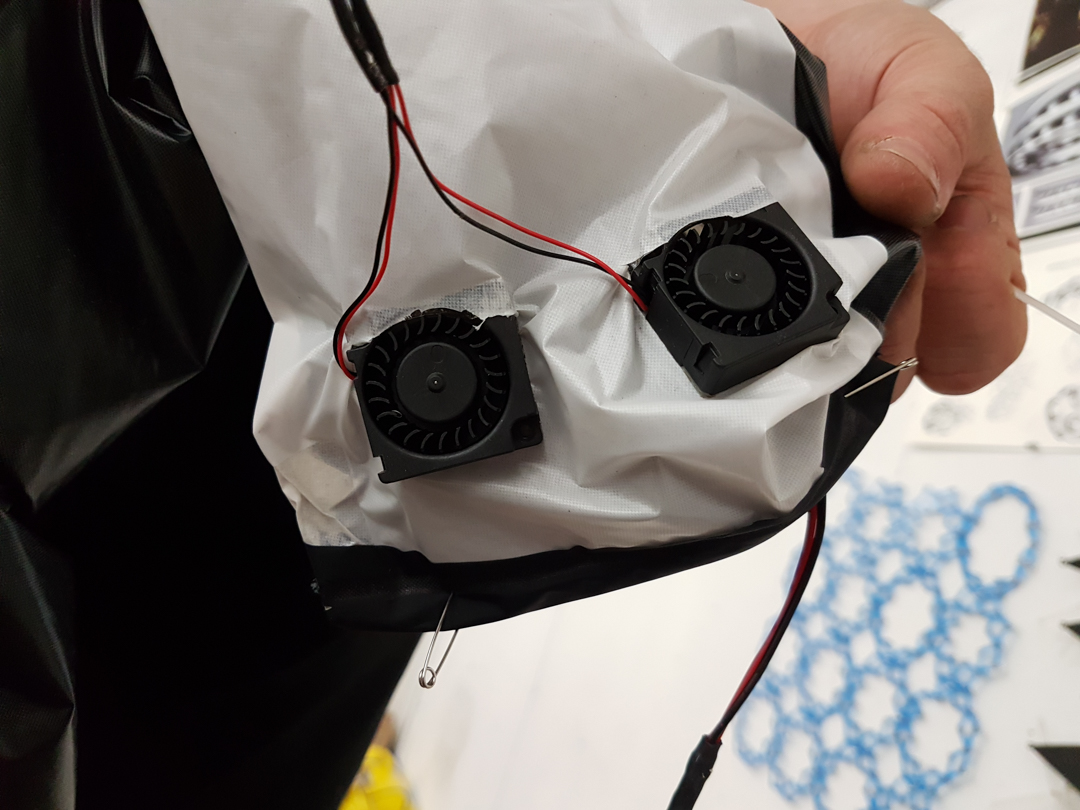
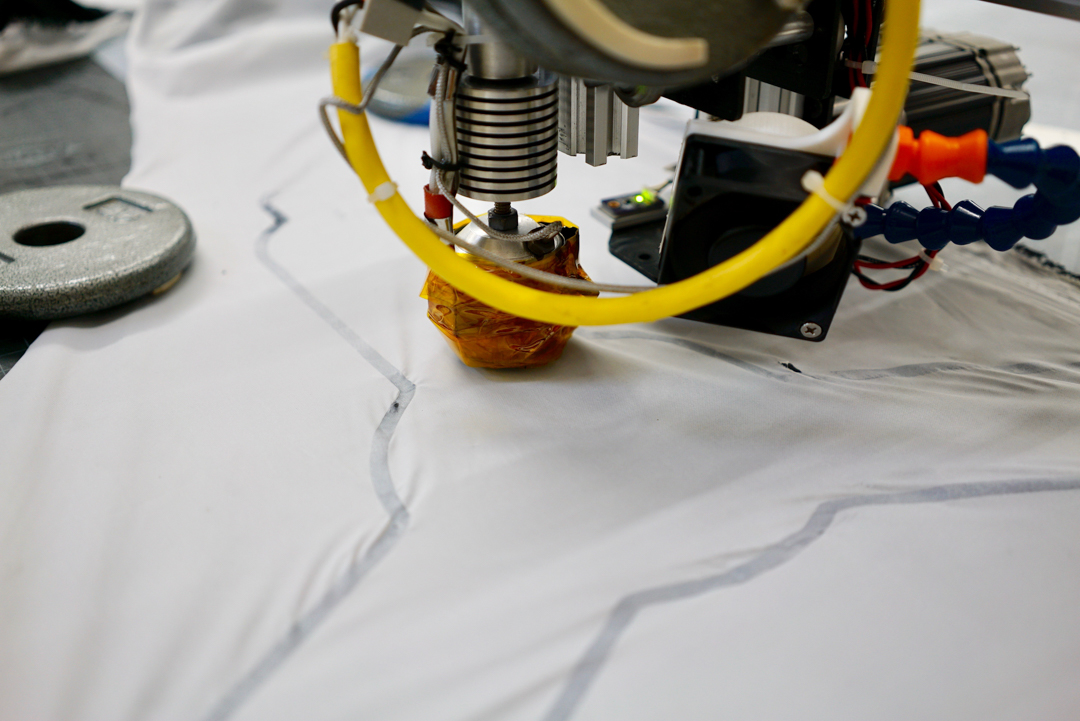
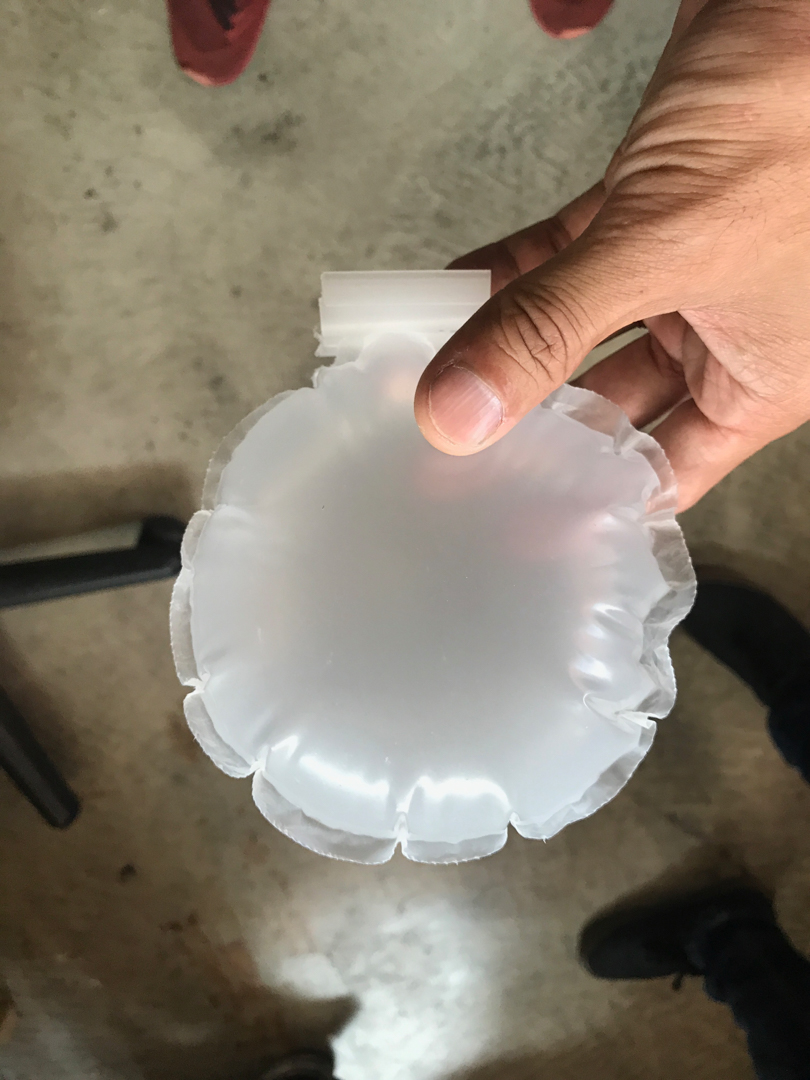
DIGITAL PNEUMATICS 1:
This project builds on the work of AeroMorph (Ou et al, 2016), a desktop CNC heat sealing machine. We designed and built a much larger machine (10’x10’) to approach architectural scale inflatables. With our new ceramic custom heat sealing hot end and many ongoing improvements, we’re now able to heat seal up to 6mil PET and make large bladders up to 8’ in diameter. In phase 2, we look forward to exploring new approaches to pneumatic folding. (Supported by Faculty Development Fund to CW)




[Credits]:
Principal: Che-Wei Wang
Student Research Assistants: Ed Wu, Andreas Tellman, Iyatunde Majekodunmi, Mengxi He, Mandy Xie
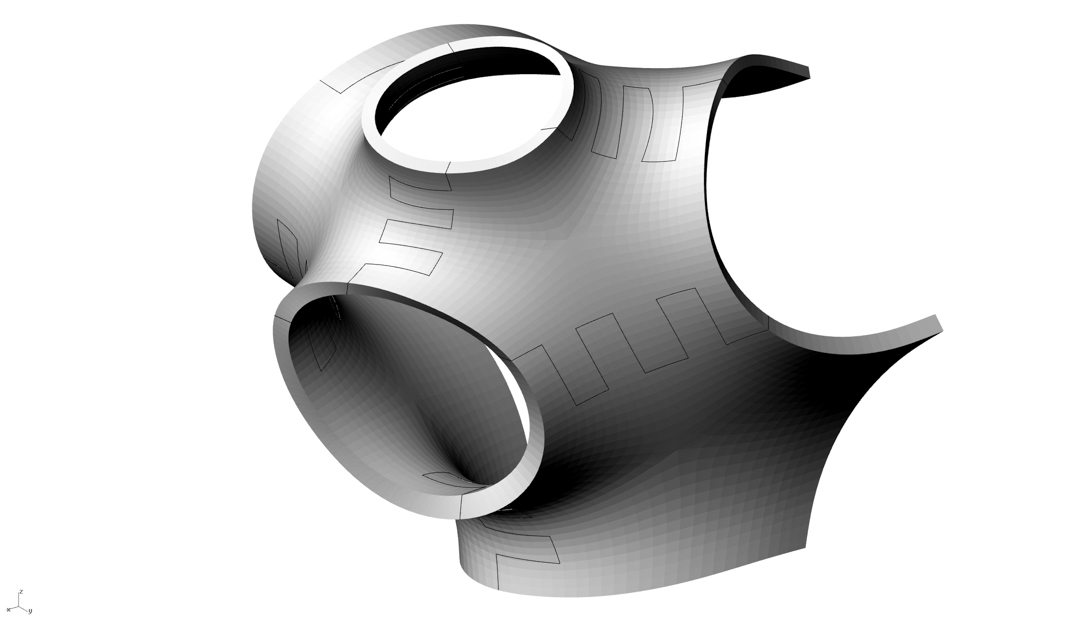
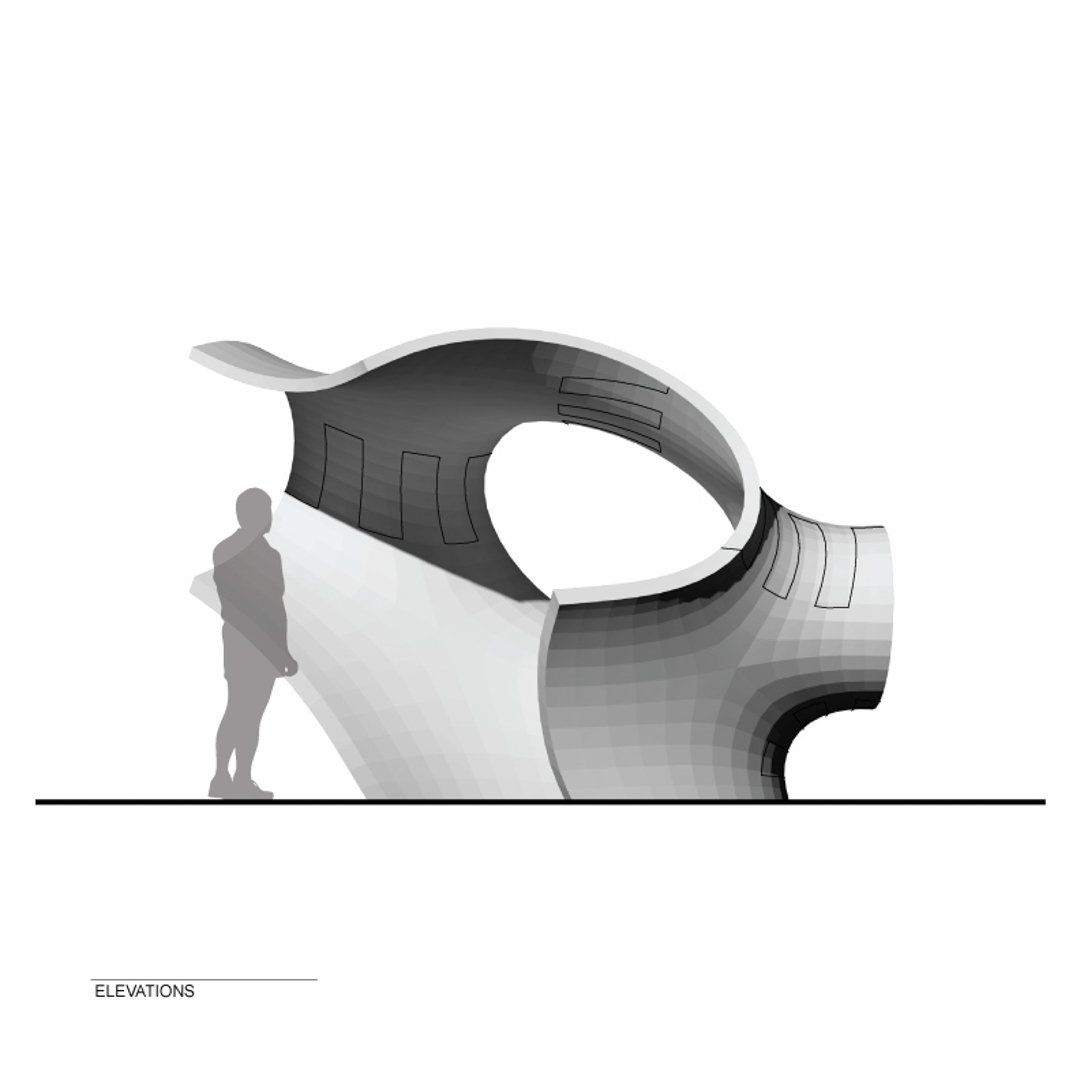
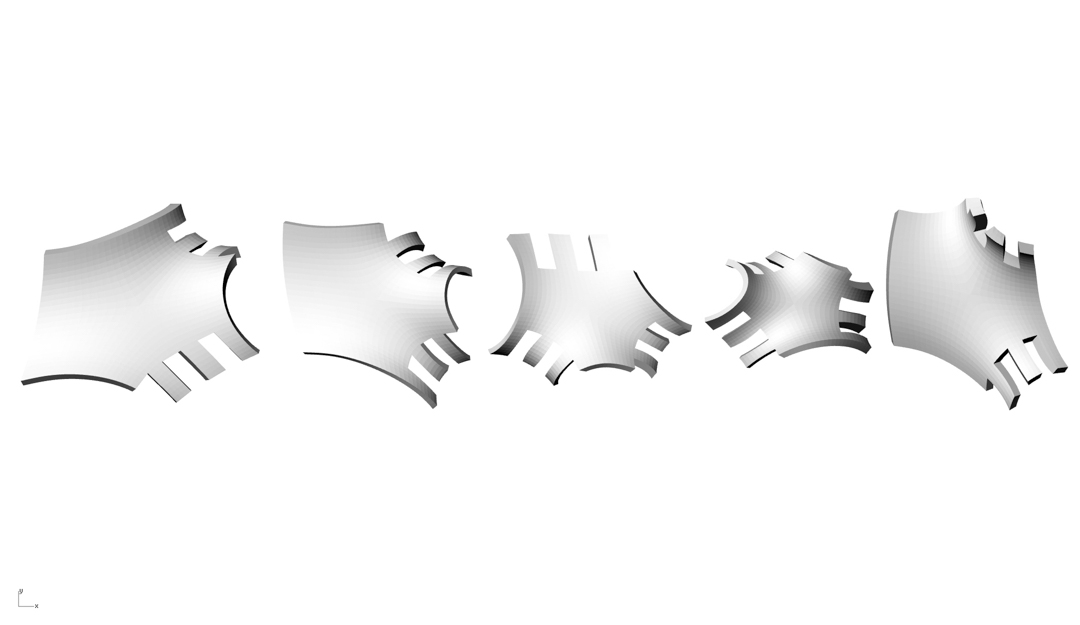
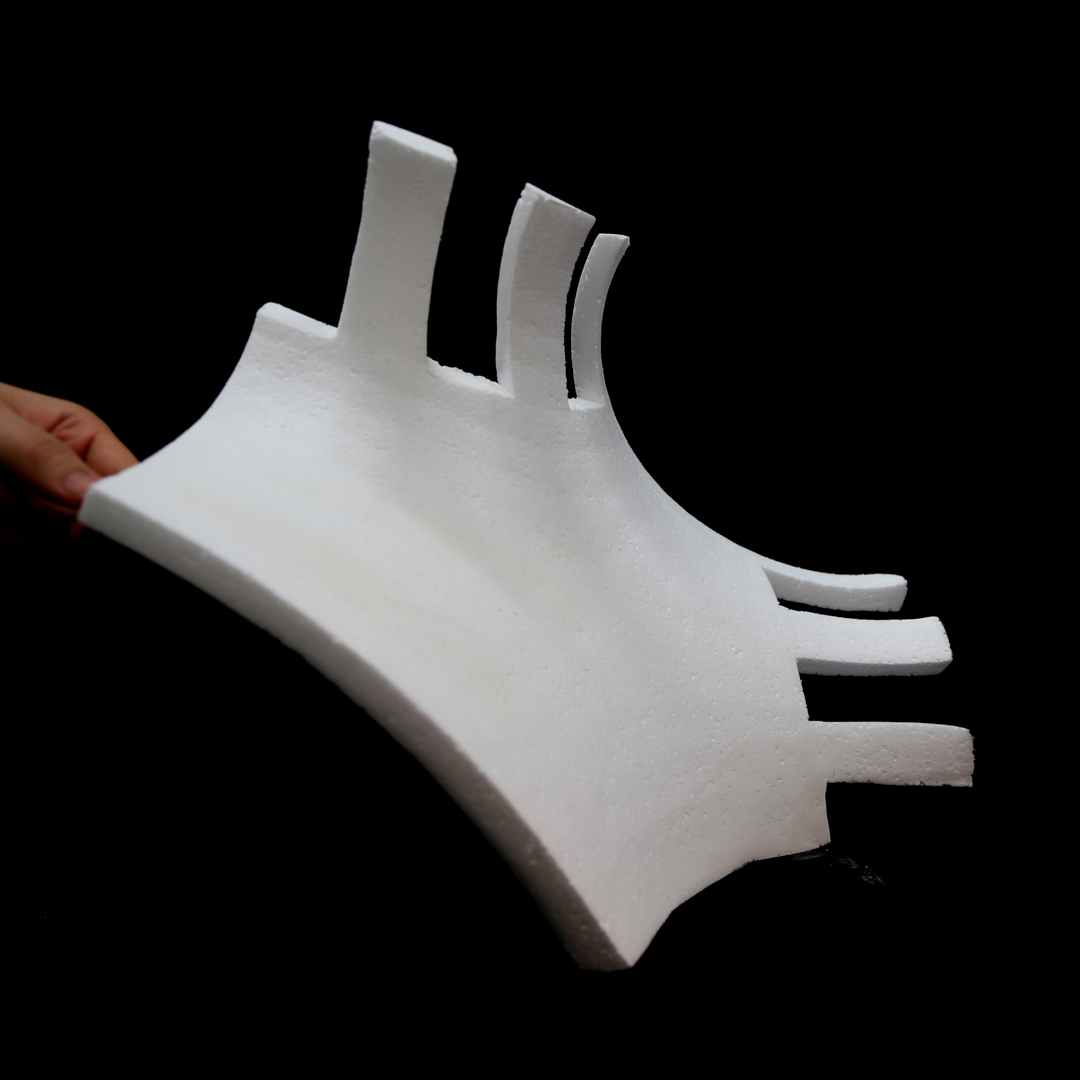
SELF-LOCK PAVILION (PHASE 1):
This project aims to build a continuously smooth minimal surface from interlocking shell parts without the use of additional joining materials/devices. The digitation is being developed to accommodate a sequential assembly and resist the local bending forces at the joints. We’ve explored variable shell thickness to control the center of gravity for self-stability. After initial tests in 3D prints, we have assembled with robotically milled foam pieces and are exploring more rigid materials and larger size. The morphology/form is based on the experimental work in higher-dimensional and non-periodic structures at Lalvani Studio and builds on the 6-dimensional non-periodic minimal surface proposed by Lalvani (1986) as a continuously curved 3D surface related to Shechtman’s quasicrystal (1984).





[Credits]:
Principals: Haresh Lalvani (Principal), John Gulliford,
Student Research Assistants: Robinson Strong, Ahmad Tabbakh